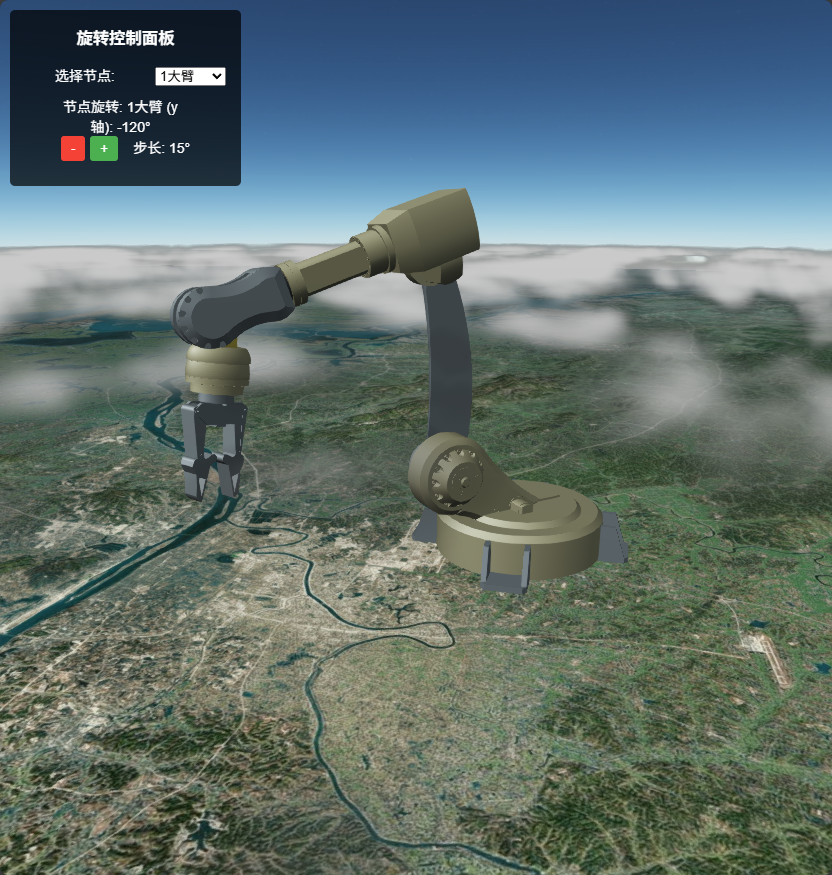
机械臂动画控制组件
功能介绍
通过机械臂动画控制组件,能够更方便地生成机械臂动画。你也可以参考代码修改为任何模型的动画。
本组件还使用到了 Tween 开源库。
不妨通过代码示例在 Vue 中尝试一下:
在线演示
点击 在线链接 以查看在线演示。
组件代码示例
默认路径为 components/roboticArmControl/index.vue
vue
<template>
<div>
<!-- 旋转控制面板 -->
<div
v-if="showControls"
id="rotationControls"
style="
position: absolute;
top: 10px;
left: 10px;
z-index: 1000;
background: rgba(0, 0, 0, 0.7);
color: white;
padding: 15px;
border-radius: 5px;
font-family: Arial, sans-serif;
"
>
<h3 style="margin-top: 0">旋转控制面板</h3>
<div style="margin-bottom: 10px">
<label for="nodeSelector">选择节点: </label>
<select
id="nodeSelector"
v-model="selectedNodeName"
@change="updateSelectedNode"
>
<option
v-for="nodeName in nodeNames"
:key="nodeName"
:value="nodeName"
>
{{ nodeName }}
</option>
</select>
</div>
<div style="margin-bottom: 10px">
<label
>节点旋转: {{ selectedNodeName }} ({{ getNodeAxis }}轴):
{{ getAngleForNode }}°</label
>
<div>
<button
@click="rotateByStep(-step)"
style="
padding: 5px 10px;
margin-right: 5px;
background: #f44336;
color: white;
border: none;
border-radius: 3px;
cursor: pointer;
"
>
-
</button>
<button
@click="rotateByStep(step)"
style="
padding: 5px 10px;
margin-right: 5px;
background: #4caf50;
color: white;
border: none;
border-radius: 3px;
cursor: pointer;
"
>
+
</button>
<span style="margin-left: 10px">步长: {{ step }}°</span>
</div>
</div>
</div>
</div>
</template>
<script>
import * as Cesium from 'cesium'
import * as TWEEN from '@tweenjs/tween.js'
export default {
name: 'RoboticArmControl',
props: {
// 是否显示动画控制窗口
step: {
type: Number,
default: 20
},
showControls: {
type: Boolean,
default: true
}
},
computed: {
// 获取当前选中节点的旋转轴
getNodeAxis () {
const nodeIndex = this.nodeNames.indexOf(this.selectedNodeName);
if (nodeIndex !== -1 && nodeIndex < this.nodeAxes.length) {
return this.nodeAxes[nodeIndex];
}
return 'x'; // 默认返回x轴
},
// 获取当前选中节点的角度
getAngleForNode () {
if (this.selectedNodeName in this.nodeAngleMap) {
return this.nodeAngleMap[this.selectedNodeName];
}
return 0; // 默认角度为0
}
},
data () {
return {
xAngle: 0,
yAngle: 0,
zAngle: 0,
selectedNodeName: "1大臂",
currentNodes: {},
currentTween: [], // 存储所有正在运行的 tween 实例数组,支持并行旋转
isAnimating: false, // 控制动画循环的标志
animationFrameId: null, // 存储 requestAnimationFrame 的 ID
// 初始化参数
modelUrl: '',
modelPosition: [],
modelScale: 1,
nodeNames: [],
nodeAxes: [],
nodeAngleMap: {}
}
},
// 生命周期 - 挂载完成
mounted () {
// 启动 TWEEN 动画循环
this.animate();
},
// 生命周期 - 销毁前清理
beforeDestroy () {
this.destroy();
},
methods: {
/**
* 初始化机械臂模型
* @param {Object} config - 初始化配置对象
* @param {String} config.modelUrl - 模型URL
* @param {Array} config.modelPosition - 模型位置 [lon, lat, height]
* @param {Number} config.modelScale - 模型缩放大小
* @param {Array} config.nodeNames - 节点名称数组
* @param {Array} config.nodeAxes - 每个节点对应的旋转轴
* @param {Object} config.nodeAngleMap - 节点角度映射
*/
async init (config) {
try {
// 保存初始化参数
const uniCore = config.uniCore;
this.modelUrl = config.modelUrl || '';
this.modelPosition = config.modelPosition || [];
this.modelScale = config.modelScale || 1;
this.nodeNames = config.nodeNames || [];
this.nodeAxes = config.nodeAxes || [];
this.nodeAngleMap = config.nodeAngleMap || {};
// 加载 GLTF 模型
const armModel = await uniCore.model.addGltf({
lon: this.modelPosition[0],
lat: this.modelPosition[1],
height: this.modelPosition[2]
}, {
id: "机械臂模型",
name: null,
url: this.modelUrl,
scale: this.modelScale,
property: null
});
// 模型加载完成后获取关键节点
armModel.readyEvent.addEventListener(() => {
// 获取所有节点并保存初始矩阵
this.currentNodes = {};
this.nodeNames.forEach(name => {
const node = armModel.getNode(name);
if (node) {
// 保存节点的初始矩阵
node.initialMatrix = Cesium.Matrix4.clone(node.matrix);
// 将节点存储到currentNodes对象中
this.currentNodes[name] = node;
}
});
// 存储模型以供使用
window.currentModel = armModel;
// 设置默认选中的节点
this.selectedNodeName = this.nodeNames[0] || "";
// 触发模型加载完成事件
this.$emit('model-loaded', armModel);
});
} catch (error) {
console.error('机械臂模型加载失败:', error);
this.$emit('load-error', error);
}
},
/**
* 销毁组件,清理资源
*/
destroy () {
// 停止所有正在运行的 tween
if (this.currentTween && this.currentTween.length > 0) {
this.currentTween.forEach(tween => {
tween.stop();
});
this.currentTween = [];
}
// 清除所有 tween
TWEEN.removeAll();
// 停止动画循环
if (this.animationFrameId) {
cancelAnimationFrame(this.animationFrameId);
this.animationFrameId = null;
}
// 清理模型
if (window.currentModel && window.viewer) {
window.viewer.scene.primitives.remove(window.currentModel);
window.currentModel = null;
}
// 清空节点
this.currentNodes = {};
},
/**
* 更新模型位置
* @param {Array} position - [lon, lat, height]
*/
updateModelPosition (position) {
if (window.currentModel && window.viewer) {
window.viewer.model.changeModelPos(window.currentModel, position);
}
},
/**
* 更新模型缩放
* @param {Number} scale - 缩放比例
*/
updateModelScale (scale) {
if (window.currentModel) {
window.currentModel.scale = scale;
}
},
/**
* 更新选中的节点
*/
updateSelectedNode () {
if (this.currentNodes[this.selectedNodeName]) {
// 更新旋转角度为当前节点的旋转状态
// 注意:这里需要根据实际情况获取当前节点的旋转状态
}
},
/**
* 通用旋转步进方法(带动画,支持并行)
* @param {Number} step - 旋转步进角度
* @param {String} nodeName - 可选,指定要旋转的节点名称,不指定则使用当前选中节点
* @returns {Promise} 返回 Promise,在动画完成时 resolve
*/
rotateByStep (step, nodeName = null) {
return new Promise((resolve, reject) => {
const targetNodeName = nodeName || this.selectedNodeName;
const node = this.currentNodes[targetNodeName];
if (node) {
// 获取当前选中节点的索引
const nodeIndex = this.nodeNames.indexOf(targetNodeName);
if (nodeIndex !== -1 && nodeIndex < this.nodeAxes.length) {
// 根据节点的自由度轴进行旋转
const axis = this.nodeAxes[nodeIndex];
// 获取当前角度
const currentAngle = this.nodeAngleMap[targetNodeName] || 0;
const targetAngle = currentAngle + step;
// 使用 TWEEN 创建动画
const tweenObj = { angle: currentAngle };
const tween = new TWEEN.Tween(tweenObj)
.to({ angle: targetAngle }, 500) // 500ms 动画时长
.easing(TWEEN.Easing.Quadratic.InOut) // 使用缓动函数
.onUpdate(() => {
// 计算增量(步长)
const stepAngle = tweenObj.angle - this.nodeAngleMap[targetNodeName];
// 根据轴应用旋转
switch (axis) {
case 'x':
this.xAngle = tweenObj.angle;
this.rotateX(node, stepAngle);
break;
case 'y':
this.yAngle = tweenObj.angle;
this.rotateY(node, stepAngle);
break;
case 'z':
this.zAngle = tweenObj.angle;
this.rotateZ(node, stepAngle);
break;
default:
console.warn(`未知的旋转轴: ${axis},节点: ${targetNodeName}`);
}
// 更新节点角度映射
this.nodeAngleMap[targetNodeName] = tweenObj.angle;
// 触发角度更新事件
this.$emit('angle-updated', targetNodeName, tweenObj.angle);
})
.onComplete(() => {
// 从数组中移除已完成的 tween
const index = this.currentTween.indexOf(tween);
if (index > -1) {
this.currentTween.splice(index, 1);
}
this.$emit('rotation-complete', targetNodeName, targetAngle);
resolve(targetAngle); // 动画完成时 resolve
})
.start();
// 将 tween 添加到数组中
this.currentTween.push(tween);
} else {
console.warn(`节点 ${targetNodeName} 没有对应的旋转轴定义`);
reject(new Error(`节点 ${targetNodeName} 没有对应的旋转轴定义`));
}
} else {
console.warn(`节点 ${targetNodeName} 不存在`);
reject(new Error(`节点 ${targetNodeName} 不存在`));
}
});
},
/**
* 绕X轴旋转节点(增量旋转)
* @param {Object} node - 节点对象
* @param {Number} angle - 旋转角度(度)
*/
rotateX (node, angle) {
if (!node) {
throw new Error("node 尚未初始化");
}
// 将角度转换为弧度
const angleInRadians = Cesium.Math.toRadians(angle);
// 创建旋转矩阵
const rotation = Cesium.Matrix3.fromRotationX(angleInRadians);
// 将旋转应用到当前矩阵
node.matrix = Cesium.Matrix4.multiplyByMatrix3(node.matrix, rotation, node.matrix);
},
/**
* 绕Y轴旋转节点(增量旋转)
* @param {Object} node - 节点对象
* @param {Number} angle - 旋转角度(度)
*/
rotateY (node, angle) {
if (!node) {
throw new Error("node 尚未初始化");
}
// 将角度转换为弧度
const angleInRadians = Cesium.Math.toRadians(angle);
// 创建旋转矩阵
const rotation = Cesium.Matrix3.fromRotationY(angleInRadians);
// 将旋转应用到当前矩阵
node.matrix = Cesium.Matrix4.multiplyByMatrix3(node.matrix, rotation, node.matrix);
},
/**
* 绕Z轴旋转节点(增量旋转)
* @param {Object} node - 节点对象
* @param {Number} angle - 旋转角度(度)
*/
rotateZ (node, angle) {
if (!node) {
throw new Error("node 尚未初始化");
}
// 将角度转换为弧度
const angleInRadians = Cesium.Math.toRadians(angle);
// 创建旋转矩阵
const rotation = Cesium.Matrix3.fromRotationZ(angleInRadians);
// 将旋转应用到当前矩阵
node.matrix = Cesium.Matrix4.multiplyByMatrix3(node.matrix, rotation, node.matrix);
},
/**
* 通用旋转函数,支持绕任意轴旋转
* @param {Object} node - 节点对象
* @param {Number} xAngle - X轴旋转角度(度)
* @param {Number} yAngle - Y轴旋转角度(度)
* @param {Number} zAngle - Z轴旋转角度(度)
*/
rotate (node, xAngle, yAngle, zAngle) {
if (!node) {
throw new Error("node 尚未初始化");
}
// 如果节点没有保存初始矩阵,则保存当前矩阵作为初始状态
if (!node.initialMatrix) {
node.initialMatrix = Cesium.Matrix4.clone(node.matrix);
}
// 从初始矩阵开始计算旋转
const initialMatrix = node.initialMatrix;
// 获取初始位置
const position = new Cesium.Cartesian3();
Cesium.Matrix4.getTranslation(initialMatrix, position);
// 创建绕各轴的旋转矩阵
const rotX = Cesium.Matrix3.fromRotationX(Cesium.Math.toRadians(xAngle));
const rotY = Cesium.Matrix3.fromRotationY(Cesium.Math.toRadians(yAngle));
const rotZ = Cesium.Matrix3.fromRotationZ(Cesium.Math.toRadians(zAngle));
// 按ZYX顺序组合旋转矩阵 (Tait-Bryan angles)
let rotationMatrix = Cesium.Matrix3.clone(rotX);
if (yAngle !== 0) {
const tempMatrix = Cesium.Matrix3.multiply(rotY, rotationMatrix, new Cesium.Matrix3());
rotationMatrix = tempMatrix;
}
if (zAngle !== 0) {
const tempMatrix = Cesium.Matrix3.multiply(rotZ, rotationMatrix, new Cesium.Matrix3());
rotationMatrix = tempMatrix;
}
// 创建新的变换矩阵,保持位置不变,只更新旋转
const newMatrix = Cesium.Matrix4.fromRotationTranslation(rotationMatrix, position);
node.matrix = newMatrix;
},
/**
* 旋转指定节点到指定角度
* @param {String} nodeName - 节点名称
* @param {Number} angle - 目标角度(度)
* @param {Number} duration - 动画时长(毫秒),默认500ms
*/
rotateNodeToAngle (nodeName, angle, duration = 500) {
const node = this.currentNodes[nodeName];
if (!node) {
console.warn(`节点 ${nodeName} 不存在`);
return;
}
const nodeIndex = this.nodeNames.indexOf(nodeName);
if (nodeIndex === -1 || nodeIndex >= this.nodeAxes.length) {
console.warn(`节点 ${nodeName} 没有对应的旋转轴定义`);
return;
}
const axis = this.nodeAxes[nodeIndex];
const currentAngle = this.nodeAngleMap[nodeName] || 0;
// 如果有正在运行的 tween,先停止它
if (this.currentTween) {
this.currentTween.stop();
}
// 使用 TWEEN 创建动画
const tweenObj = { angle: currentAngle };
this.currentTween = new TWEEN.Tween(tweenObj)
.to({ angle: angle }, duration)
.easing(TWEEN.Easing.Quadratic.InOut)
.onUpdate(() => {
const stepAngle = tweenObj.angle - this.nodeAngleMap[nodeName];
switch (axis) {
case 'x':
this.rotateX(node, stepAngle);
break;
case 'y':
this.rotateY(node, stepAngle);
break;
case 'z':
this.rotateZ(node, stepAngle);
break;
}
this.nodeAngleMap[nodeName] = tweenObj.angle;
this.$emit('angle-updated', nodeName, tweenObj.angle);
})
.onComplete(() => {
this.currentTween = null;
this.$emit('rotation-complete', nodeName, angle);
})
.start();
},
/**
* 重置所有节点到初始状态
*/
resetAllNodes () {
this.nodeNames.forEach(nodeName => {
const node = this.currentNodes[nodeName];
if (node && node.initialMatrix) {
// 恢复初始矩阵
node.matrix = Cesium.Matrix4.clone(node.initialMatrix);
// 重置角度
this.nodeAngleMap[nodeName] = 0;
}
});
this.$emit('reset-complete');
},
/**
* 获取节点当前角度
* @param {String} nodeName - 节点名称
* @returns {Number} 当前角度(度)
*/
getNodeAngle (nodeName) {
return this.nodeAngleMap[nodeName] || 0;
},
/**
* 获取所有节点角度
* @returns {Object} 节点角度映射对象
*/
getAllNodeAngles () {
return { ...this.nodeAngleMap };
},
/**
* 设置选中的节点
* @param {String} nodeName - 节点名称
*/
setSelectedNode (nodeName) {
if (this.nodeNames.includes(nodeName)) {
this.selectedNodeName = nodeName;
} else {
console.warn(`节点 ${nodeName} 不在节点列表中`);
}
},
/**
* 获取当前选中的节点名称
* @returns {String} 节点名称
*/
getSelectedNode () {
return this.selectedNodeName;
},
/**
* 获取节点对象
* @param {String} nodeName - 节点名称
* @returns {Object} 节点对象
*/
getNode (nodeName) {
return this.currentNodes[nodeName];
},
/**
* 获取模型对象
* @returns {Object} 模型对象
*/
getModel () {
return window.currentModel;
},
/**
* TWEEN 动画更新循环
* @param {Number} time - 时间戳
*/
animate (time) {
this.animationFrameId = requestAnimationFrame(this.animate);
if (this.currentTween) {
this.currentTween.forEach((e) => {
e.update(time);
})
}
}
}
}
</script>
<style scoped>
#rotationControls {
font-size: 14px;
}
#rotationControls label {
display: inline-block;
width: 120px;
margin-right: 10px;
}
#rotationControls input[type='range'] {
vertical-align: middle;
}
#rotationControls button {
margin-right: 5px;
}
</style>调用代码示例
vue
<template>
<div>
<div id="unicoreContainer"></div>
<!-- 机械臂控制组件开启 -->
<RoboticArmControl ref="armControl" :step="15" :show-controls="true" />
<!-- 机械臂控制组件结束 -->
</div>
</template>
<script>
import { UniCore } from 'unicore-sdk'
import { config } from 'unicore-sdk/unicore.config'
import 'unicore-sdk/Widgets/widgets.css'
import RoboticArmControl from '@/components/roboticArmControl' // 机械臂控制组件
export default {
components: {
RoboticArmControl
},
// 生命周期 - 挂载完成
mounted () {
this.init();
},
methods: {
/**
* 通用图形引擎初始化
*/
async init () {
// 初始化UniCore
let accessToken = "eyJhbGciOiJIUzI1NiIsInR5cCI6IkpXVCJ9.eyJqdGkiOiIxNjEwMzI4My01MjBmLTQzYzktOGZiMS0wMDRhZjE0N2IyMGIiLCJpZCI6MTc1NzkyLCJpYXQiOjE3MTM3NzQ3OTh9.zU-R4MNvHr8rvn1v28PQfDImyutnpPF2lmEgGeSPckQ";
let uniCore = new UniCore(config, accessToken);
uniCore.init("unicoreContainer");
let viewer = uniCore.viewer;
// 视角初始化
uniCore.position.buildingPosition(uniCore.viewer, [113.12380548015745, 28.250758831850005, 700], -20, -45, 1);
// 初始化机械臂控制组件,传递初始化参数
this.$refs.armControl.init({
uniCore: uniCore,
modelUrl: '../../../assets/gltf/机械臂-带层级(2).glb',
modelPosition: [113.12098820449636, 28.256150218457687, 50],
modelScale: 1,
nodeNames: ["1大臂", "2大臂", "3大臂", "4双叉臂", "5小臂", "6旋转", "10夹爪1", "10夹爪2"],
nodeAxes: ["y", "y", "z", "x", "x", "z", "x", "x"],
nodeAngleMap: {
"1大臂": 0,
"2大臂": 0,
"3大臂": 0,
"4双叉臂": 0,
"5小臂": 0,
"6旋转": 0,
"10夹爪1": 0,
"10夹爪2": 0
}
});
},
}
}
</script>
<style scoped>
#unicoreContainer {
position: absolute;
top: 0;
left: 0;
width: 100%;
height: 100%;
overflow: hidden;
background: black;
}
</style>示例运行结果
调用代码示例中的关键代码
js
// 初始化机械臂控制组件,传递初始化参数
this.$refs.armControl.init({
uniCore: uniCore,
modelUrl: '../../../assets/gltf/机械臂-带层级(2).glb',
modelPosition: [113.12098820449636, 28.256150218457687, 50],
modelScale: 1,
nodeNames: ["1大臂", "2大臂", "3大臂", "4双叉臂", "5小臂", "6旋转", "10夹爪1", "10夹爪2"],
nodeAxes: ["y", "y", "z", "x", "x", "z", "x", "x"],
nodeAngleMap: {
"1大臂": 0,
"2大臂": 0,
"3大臂": 0,
"4双叉臂": 0,
"5小臂": 0,
"6旋转": 0,
"10夹爪1": 0,
"10夹爪2": 0
}
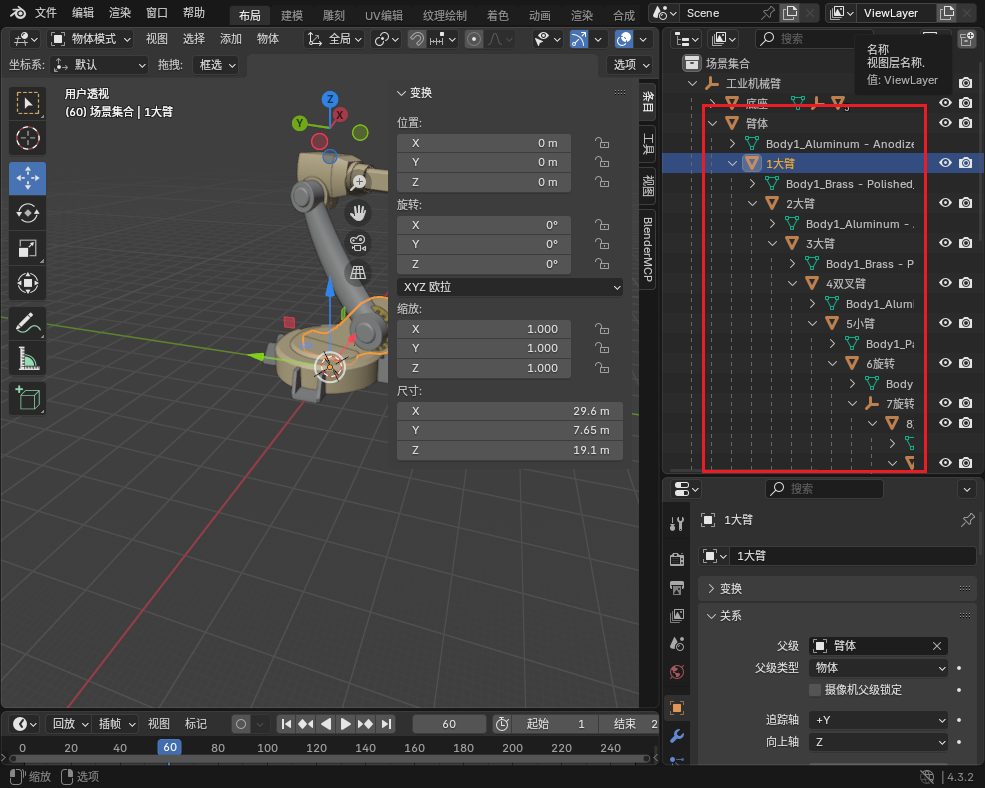
});nodeNames 为需要控制的节点名称,你可以在专业软件如 blender 获取。
nodeAxes 为需要控制节点对应的旋转轴。
nodeAngleMap 为需要控制的节点对应的初始角度。
拓展
此外,你可以应用动画。
js
/**
* 延迟函数辅助器
* @param {Number} ms - 延迟毫秒数
* @returns {Promise}
*/
delay (ms) {
return new Promise(resolve => setTimeout(resolve, ms));
},
/**
* 执行机械臂动画序列
*/
async executeArmAnimation () {
try {
// 等待 2 秒后开始动画
await this.delay(2000);
// 依次执行旋转动画
await this.$refs.armControl.rotateByStep(-45, "1大臂");
await this.$refs.armControl.rotateByStep(-75, "1大臂");
await Promise.all([
this.$refs.armControl.rotateByStep(35, "3大臂");
this.$refs.armControl.rotateByStep(720, "6旋转");
this.$refs.armControl.rotateByStep(75, "5小臂");
this.$refs.armControl.rotateByStep(75, "4双叉臂");
this.$refs.armControl.rotateByStep(15, "10夹爪1");
this.$refs.armControl.rotateByStep(15, "10夹爪2");
])
await this.delay(600);
await Promise.all([
this.$refs.armControl.rotateByStep(-15, "10夹爪1");
this.$refs.armControl.rotateByStep(-15, "10夹爪2");
])
await this.delay(600);
await Promise.all([
this.$refs.armControl.rotateByStep(-35, "2大臂");
this.$refs.armControl.rotateByStep(-15, "3大臂");
this.$refs.armControl.rotateByStep(-45, "5小臂");
this.$refs.armControl.rotateByStep(-60, "4双叉臂");
this.$refs.armControl.rotateByStep(90, "6旋转");
])
console.log('机械臂动画序列执行完成');
} catch (error) {
console.error('机械臂动画执行失败:', error);
}
},注意,使用 await 可以让动画按顺序依次进行。如果想要多个动画同时进行,你需要使用 Promise.all 包裹多个需要同时进行的动画。这样即使浏览器标签页失焦、动画一度被暂停,回到页面时,当前批次的所有关节会先补完到应到的位置,然后才进入下一批,不会出现“有些关节没跑完、后面的动作又叠上去”的问题。